The Goal: Perfect Precision. The Problem: My Own Mistake.
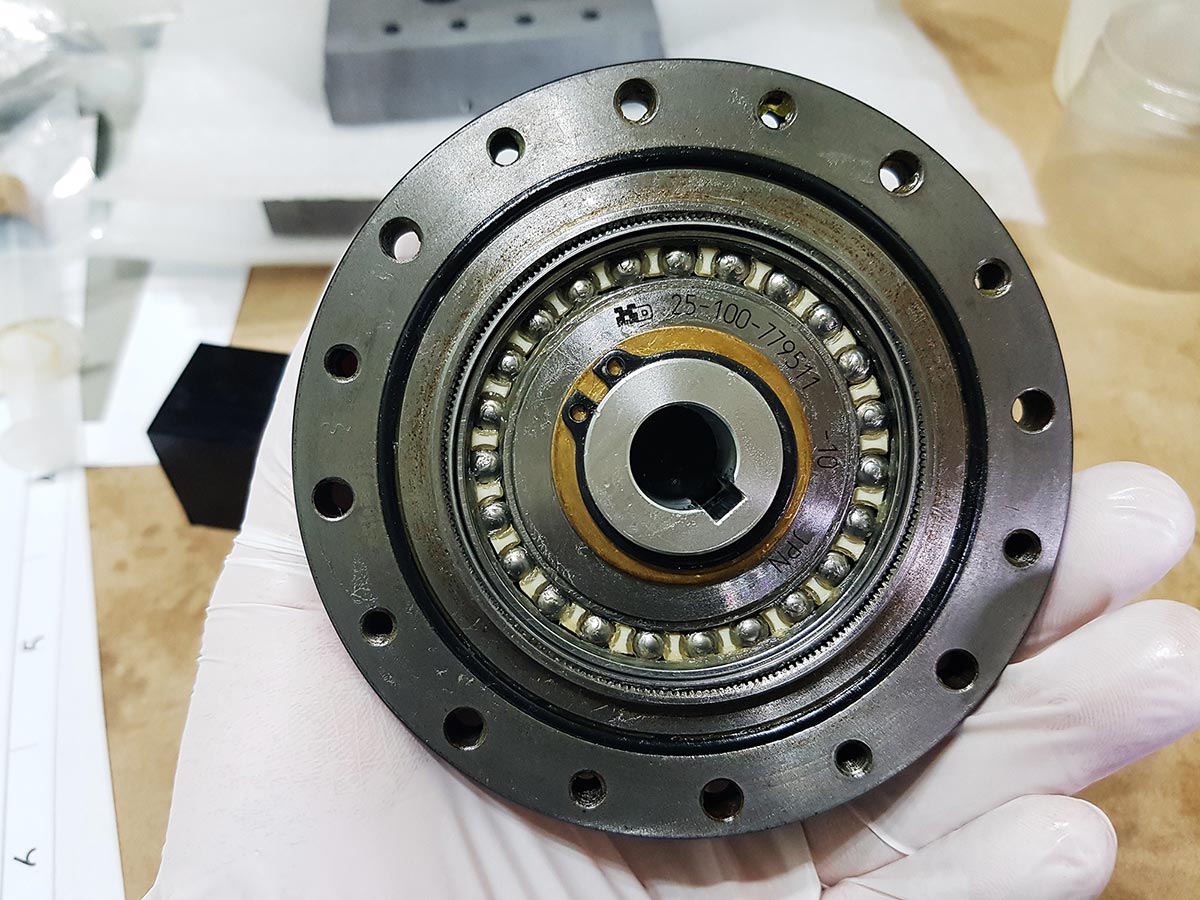
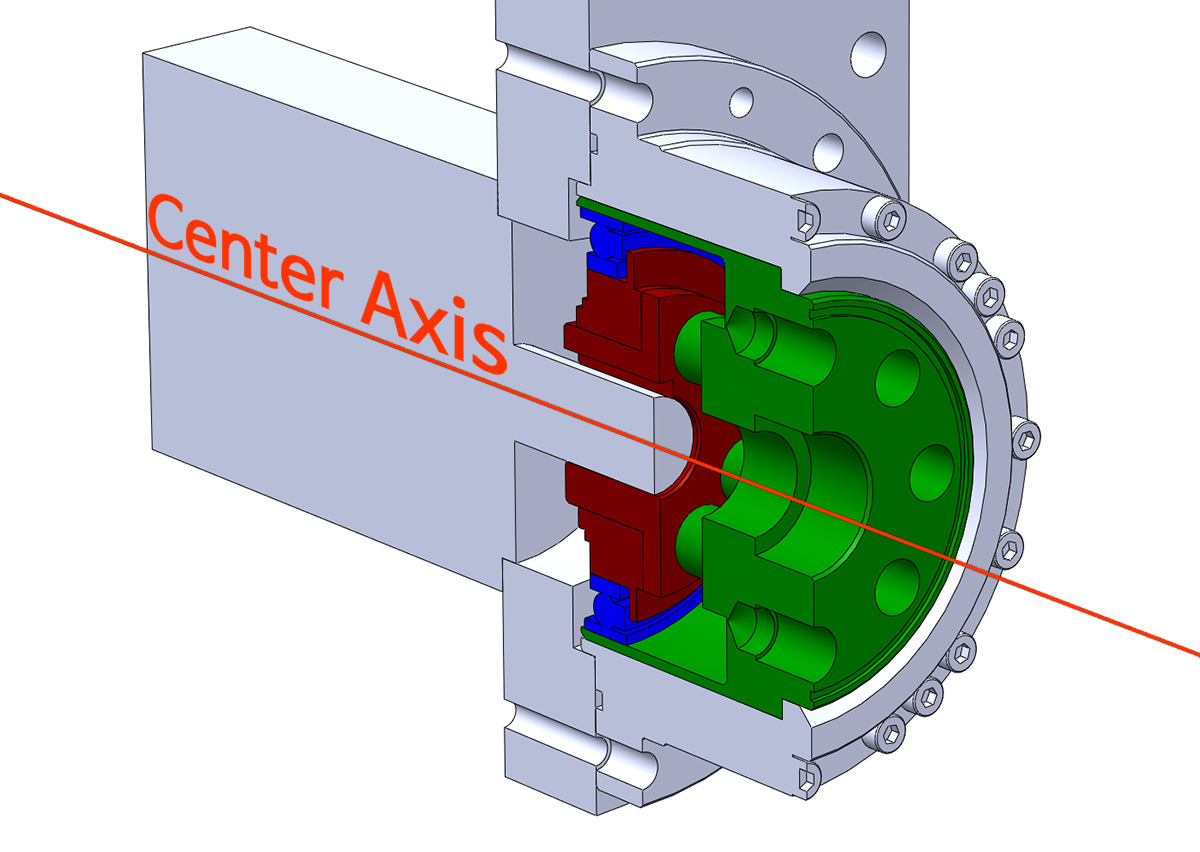
For my CNC project, I chose a Harmonic Drive (a type of strain wave reducer). Why? Because its unique mechanism—using a Circular Spline, a Flexspline, and a Wave Generator—provides near-zero backlash. This allows for the kind of ultra-precise angular control that other gear systems can’t touch. This incredible precision is why I was willing to overlook its other drawbacks.
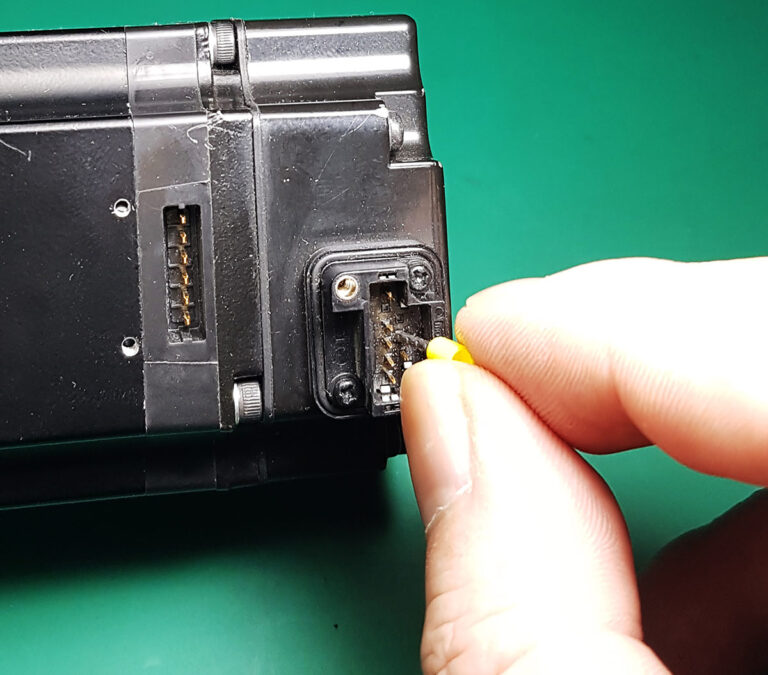
However, “near-zero” isn’t “zero.” A tiny amount of backlash can still occur, often from the microscopic gap within the Oldham coupling (the part that connects the motor shaft to the wave generator). This gap becomes a real problem if the servo motor shaft and the reducer’s input shaft aren’t perfectly aligned (concentric). Poor alignment causes friction and wear, making that tiny backlash gap grow larger over time.
Alignment, therefore, is critical. And, well… I messed up.
I had miscalculated a dimension for the motor’s mounting flange. My own design flaw. This created a sloppy fit, making it impossible to achieve the precise concentricity required.
The Solution: When in Doubt, Machine Your Own Tool
After staring at the problem, an idea struck: a custom alignment jig. The design of the reducer had a hollow center, making it possible to align the input and output shafts by passing a single, precision-ground rod through both.
I grabbed a round bar of Acetal (POM) and headed to my small lathe.
Why Acetal? It’s the perfect material for a job like this:
- Easy to Machine: It cuts cleanly on a lathe.
- Dimensionally Stable: It doesn’t warp or change size easily.
- Low Friction: This is the most important part. Its slippery nature means I can slide it in and out of the high-precision bearings without a fight or damaging them.
It’s a quick-and-dirty tool, shaped purely for function, but it’s the best solution for this specific problem.

Putting the Jig to Work: The Technician’s Touch
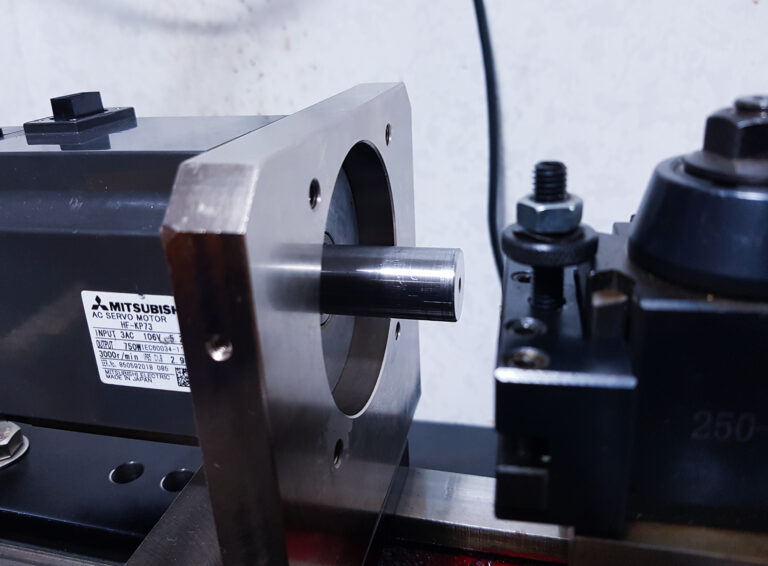
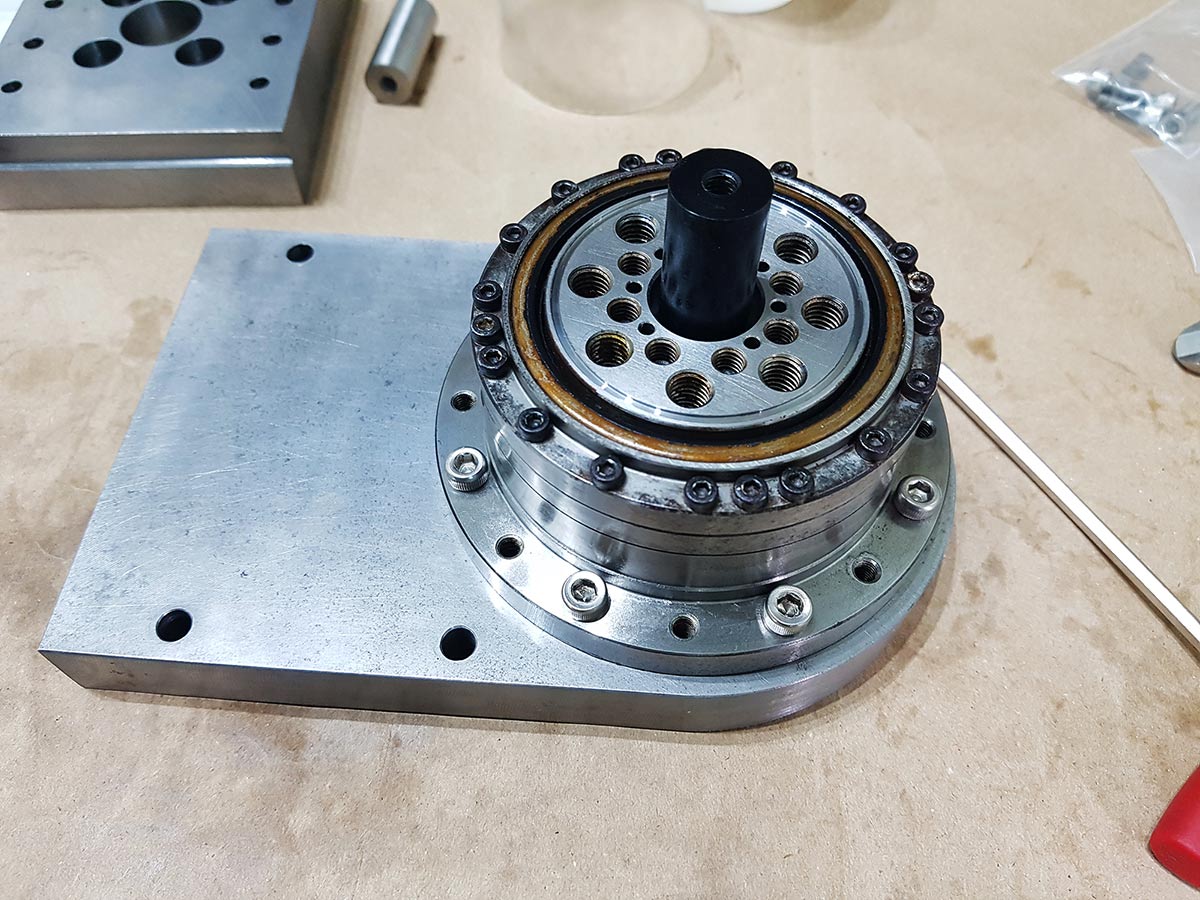
The rest was simple. First, I bolted the Harmonic Drive reducer to its base plate. Then, I inserted my new custom jig.
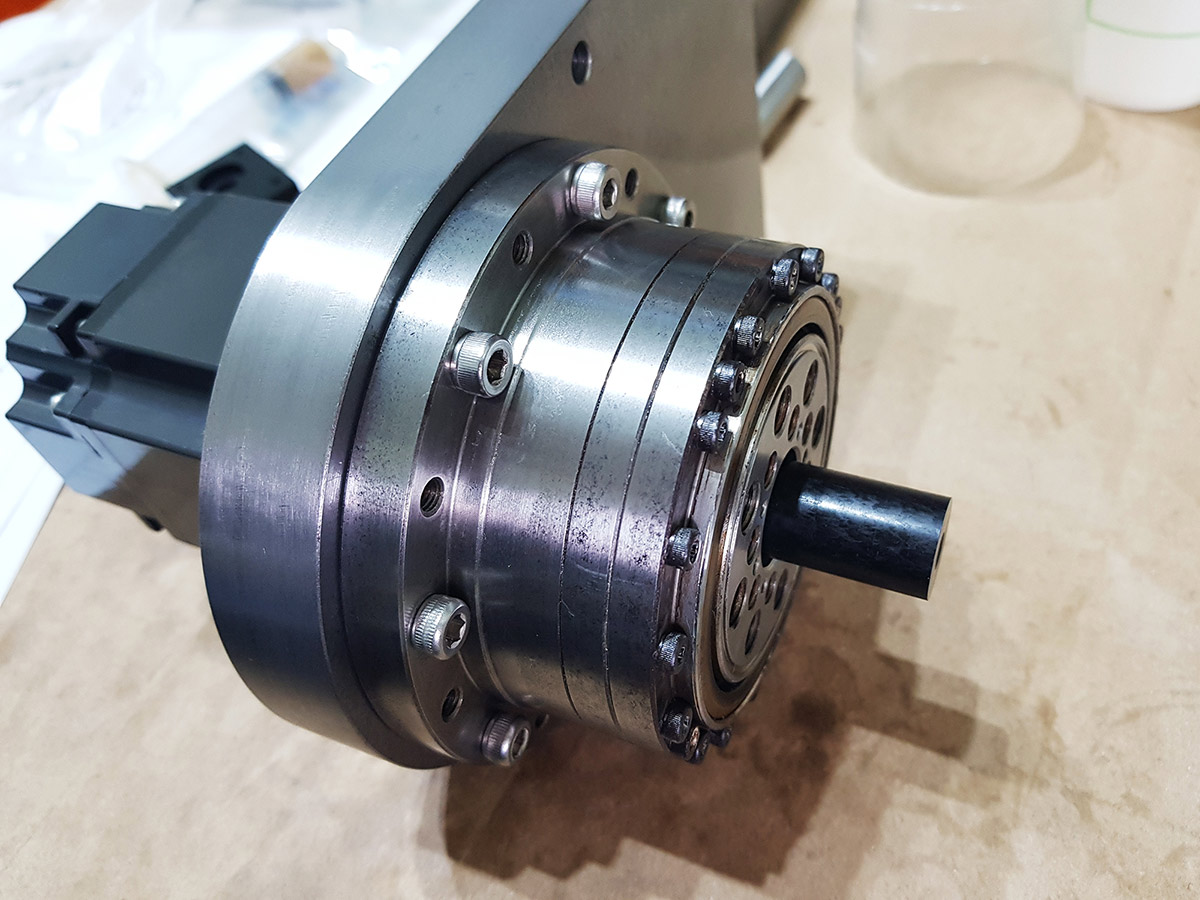
Next, I mounted the servo motor to the other side of the base plate. Finally, with the motor bolts still loose, I used a rubber mallet to give the jig a few gentle taps. This “technician’s touch” nudges the wave generator (via the Oldham coupling) into perfect alignment with the reducer’s central axis. Once aligned, I tightened everything down.
The Result: A Flaw Corrected
The result? Success. After removing the jig and running a test, I could see no visible runout (wobble) at all. The alignment was perfect.

In the end, this was all an unnecessary workaround for a problem that wouldn’t have existed if I had just double-checked my initial design. But, things don’t always go to plan. I’m leaving this log here for anyone else who might run into a similar problem. Sometimes, fixing your own mistake is the most satisfying part of the build.